:::
科技新知

感測器融合技術,實現車輛自動駕駛願景
發表日期:2017-07-12
作者:江柏風(工研院IEK)
摘要:
自動駕駛車輛需要即時取得車輛週邊的所有資訊,需仰賴車上配置的所有感測器,以建構出車輛週邊環境的360度現場資訊。
全文:
一、自動駕駛系統需求多組感測器
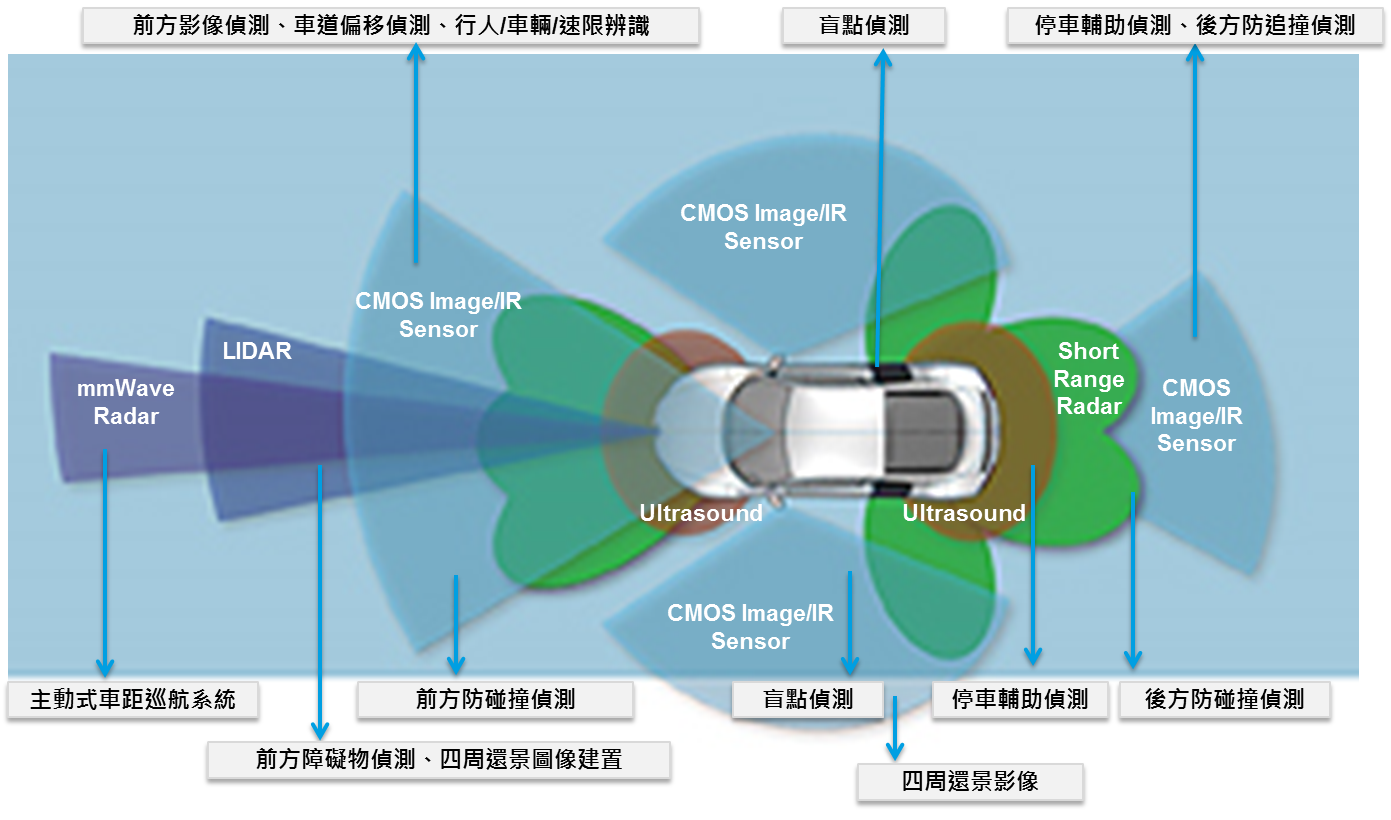
自動駕駛車輛需要即時取得車輛週邊的所有資訊,需仰賴車上配置的所有感測器,如:影像感測器、短距雷達、長距雷達、超音波雷達、光達(Lidar)、衛星定位(GPS)…等感測器的資料,以建構出車輛週邊環境的360度現場資訊,如圖1所示,再將判讀後有用資訊後送至中央處理器,經由高速運算分析後,下達執行車輛控制的指令,讓車輛可以自動駕駛。車輛自動駕駛主要依賴先進駕駛輔助系統(Advanced Driver Assistance Systems;ADAS),ADAS是利用上述多組感測器所偵測到的資訊,建構出車輛環周的資料,經中央處理器運算後,來控制車輛自動行進的動向,以達到車輛自動駕駛的願景。
每一種類感測器都有其優、缺點,如:影像感測器在低光源或天候不佳時的影像品質較差。雷達感測器較不受到天候變化影響;但是,雷達的解析度不如影像感測器高。光達感測器可提供較佳立體影像,但是在天候不佳的下雨、風雪或冰雹時,光達感測器的偵測精準度會下降。衛星定位精度較差,無法取得較短距離(1公尺以下)的即時定位資訊。
所以一輛汽車上,需要建置多顆不同種類的感測器,藉由取得每個感測器精準的資訊,來達到車輛全方位監控的需求,並可以全時感測車輛四周即時的變化,即時做出最安全的操控。
資料來源:工研院IEK ITIS研究團隊 (2017/06)
圖1 車輛所有感測器監控範圍示意圖
二、感測器融合技術孕育而生
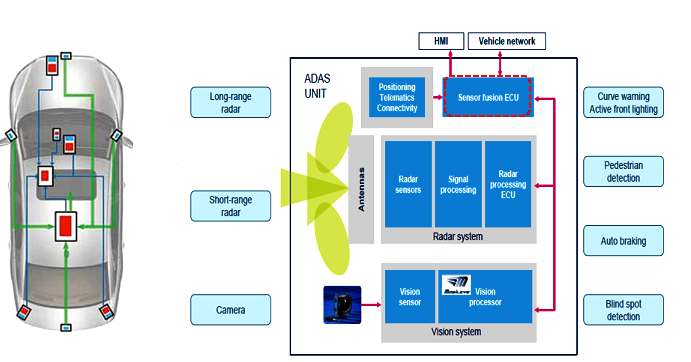
感測器融合 (Sensor Fusion) 的創新概念是同時匯集『多顆』、『同類型』或『不同種類』感測器的資訊,先進行初步整合所有高精度的感測數據,最後將多組初步整合好的資訊再交給中央處理器進行判讀與運算,如圖2所示,可以更快和更準確地感知車輛週邊環境。相對於現有獨立感測系統,感測器融合技術可以做出更快、更好、更安全的車輛控制指令。
感測器融合技術主要在獲得多組感測器輸入的資訊內容,並且使用組合在一起的資訊來更加準確地感知周圍的環境。相對於獨立系統,這樣可以做出更好、更安全的決策。例如:雷達不具有影像感測器所具有的高解析度,不過它在測距和穿透雨、雪和濃霧方面具有很大優勢,所以結合雷達與影像感測器的資訊,可以達到全面性以及全天候感測車輛外在環境的需求,以達到真正車輛使用環境的無限制。
將前方雷達與前方影像感測器融合在一起,以實現自我調整巡航控制和車道維持輔助,或者將後視影像感測器與超音波測距感測器組合在一起來實現自動停車。藉由整合與優先處理多組感測器資訊,進行分工優先處理感測訊號,最後依感測資訊的警示等級,決定直接顯示警示,或是後送至中央處理器進行實際操控的執行。此分工處理的架構,就是感測器融合技術的真正核心所在,可加快資訊處理的速度,也可以減輕中央處理器的運算負荷。
資料來源:TI, STM (2017/06)
圖2 感測器融合系統與晶片架構圖
三、感測器融合ECU市場向上成長
Intel、Mobileye、BMW於2017年 CES發表Intel Go自駕車平台,結合Intel處理器/FPGA/SSD/人工智慧平台技術、Mobileye 360度環景視覺感測器/演算法、BMW自駕車開發技術,執行感測器融合、環境建模、路徑規劃、駕駛策略、決策制定等自動駕駛功能。
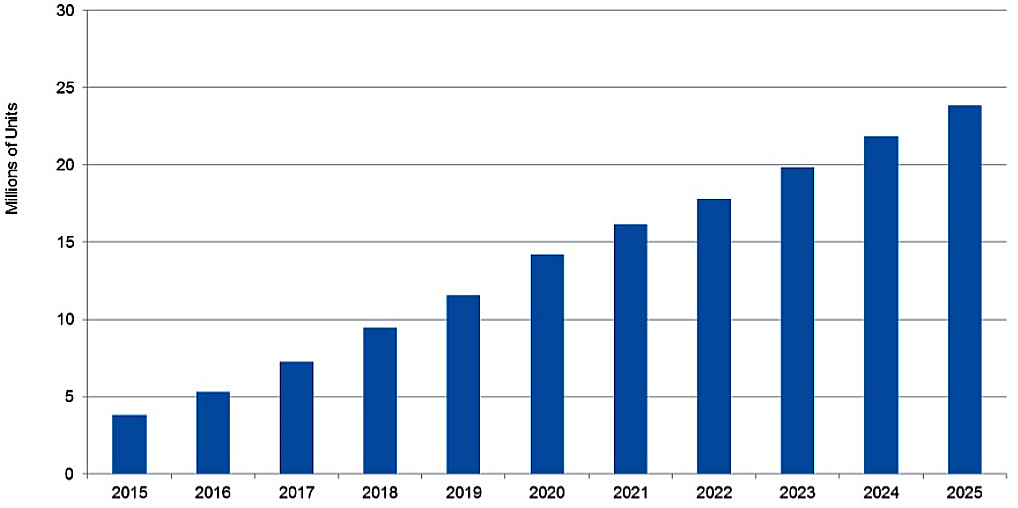
國際市調機構IHS研究數據顯示,在2015年,只有4%的新車內建感測器融合技術的電子控制單元 (Engine Control Unit, ECU),如圖3所示,主要以執行環周影像停車輔助與車輛安全功能;預測在2025年,感測器融合技術的滲透率將提高到21%,並可執行更多車輛安全系統,以達到車輛自動駕駛的願景。在2015~2025年,感測器融合ECU市場的年複合成長率(CAGR)高達20%,為汽車產業中成長動能強勁的關鍵電子元件。
資料來源:IHS (2017/06)
圖3 感測器融合ECU市場成長趨勢
四、IEKView
隨著車輛安全的等級由L1提升至L4的全自動駕駛,在一台汽車上最多將要配置高達35個感測器,才能完整執行全自動駕駛的願景。為了縮短感測運算時間和降低中央處理器的運算負荷,『感測器融合技術』將以特定系統功能分工的架構,來讓自動駕駛運算速度可以更快和降低所需要的功耗。隨著感測器融合技術的開發,將帶動感測器融合ECU的新市場商機在車輛市場中浮現出來,同時也帶給半導體業者新的市場商機。建議國內半導體業者可提早投入此新晶片的開發,儘早切入感測器融合ECU的市場,以取得先期市場的高利潤商機。
(本文作者為工研院IEK執行產業技術前瞻研究與知識服務計畫產業分析師)
 點閱數
點閱數:
5234
